Electric motor

An electric motor converts electrical energy into mechanical motion. The reverse task, that of converting mechanical motion into electrical energy, is accomplished by a generator or dynamo. In many cases the two devices differ only in their application and minor construction details.
Most electric motors work by electromagnetism, but motors based on other electromechanical phenomena, such as electrostatic forces and the piezoelectric effect, also exist. The fundamental principle upon which electromagnetic motors are based is that there is a mechanical force on any wire when it is conducting electricity while contained within a magnetic field. The force is described by the Lorentz force law and is perpendicular to both the wire and the magnetic field. In a rotary motor, there is a rotating element, the rotor. The rotor rotates because the wires and magnetic field are arranged so that a torque is developed about the rotor's axis.
Most magnetic motors are rotary, but linear types also exist. In a rotary motor, the rotating part (usually on the inside) is called the rotor, and the stationary part is called the stator. The motor contains electromagnets that are wound on a frame. Though this frame is often called the armature, that term is often erroneously applied. Correctly, the armature is that part of the motor across which the input voltage is supplied or that part of the generator across which the output voltage is generated. Depending upon the design of the machine, either the rotor or the stator can serve as the armature.
Kits for making very simple motors are used in many schools. See Westminster motor kits.
DC motors
One of the first electromagnetic rotary motors, if not the first, was invented by Michael Faraday in 1821, and consisted of a free-hanging wire dipping into a pool of mercury. A permanent magnet was placed in the middle of the pool. When a current was passed through the wire, the wire rotated around the magnet, showing that the current gave rise to a circular magnetic field around the wire. This motor is often demonstrated in school physics classes, but brine is sometimes used in place of the toxic mercury. This is the simplest form of a class of electric motors called homopolar motors.
The modern DC motor was invented by accident in 1873, when Zénobe Gramme connected a spinning dynamo to a second similar unit, driving it as a motor.
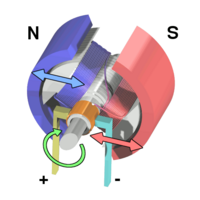
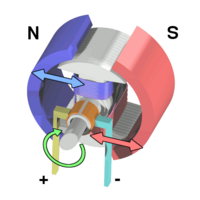
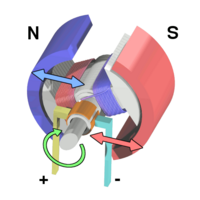
The classic DC motor has a rotating armature in the form of an electromagnet with two poles. A rotary switch called a commutator reverses the direction of the electric current twice every cycle, to flow through the armature so that the poles of the electromagnet push and pull against the permanent magnets on the outside of the motor. As the poles of the armature electromagnet pass the poles of the permanent magnets, the commutator reverses the polarity of the armature electromagnet. During that instant of switching polarity, inertia keeps the classical motor going in the proper direction. (See the diagrams below.)
DC motor speed generally depends on a combination of the voltage and current flowing in the motor coils and the motor load or braking torque. The speed of the motor is proportional to the voltage, and the torque is proportional to the current. The speed is typically controlled by altering the voltage or current flow by using taps in the motor windings or by having a variable voltage supply.
As this type of motor can develop quite high torque at low speed it is often used in traction applications such as locomotives.
However, there are a number of limitations in the classic design, many due to the need for brushes to rub against the commutator. The rubbing creates friction, and the higher the speed, the harder the brushes have to press to maintain good contact. Not only does this friction make the motor noisy, but it also creates an upper limit on the speed and causes the brushes eventually to wear out and to require replacement. The imperfect electric contact also causes electrical noise in the attached circuit. These problems vanish when you turn the motor inside out, putting the permanent magnets on the inside and the coils on the outside thus designing out the need for brushes in a brushless design. However such designs need electronic cuircuits to control the switching of the electromagnets (the function that is performed in conventional motors by the commutator).
Wound field DC motor
The permanent magnets on the outside (stator) of a DC motor may be replaced by electromagnets. By varying the field current it is possible to alter the speed/torque ratio of the motor. Typically the field winding will be placed in series (series wound) with the armature winding to get a high torque low speed motor, in parallel (shunt wound) with the armature to get a high speed low torque motor, or to have a winding partly in parallel, and partly in series (compound wound) to get the best of both worlds. Further reductions in field current are possible to gain even higher speed but correspondingly lower torque. This technique is ideal for electric traction (see Traction motor) and many similar applications where its use can eliminate the requirement for a mechanically variable transmission.
Universal motors
A variant of the wound field DC motor is the universal motor. The name derives from the fact that it may use AC or DC supply current, although in practice they are nearly always used with AC supplies. The principle is that in a wound field DC motor the current in both the field and the armature (and hence the resultant magnetic fields) will alternate (reverse polarity) at the same time, and hence the mechanical force generated is always the same. In practice the motor must be specially designed to cope with the AC current (impedance/reluctance must be taken into account), and the resultant motor is generally less efficient than an equivalent pure DC motor. The advantage of the universal motor is that AC supplies may be used on motors which have the typical characteristics of DC motors, specifically high starting torque and very compact design if high running speeds are used. The negative aspect is the maintenance and reliability problems caused by the commutator, and as a result such motors will rarely be found in industry but are the most common type of AC supplied motor in devices such as food mixers and power tools which are only used intermittently. Infinite speed control of a universal motor running on AC is very easily accomplished using a thyristor circuit while stepped speed control can be accomplished using multiple taps on the field coil. Household blenders that advertise many speeds frequently combine a field coil with several taps and a diode that can be inserted in series with the motor (causing the motor to run on half-wave DC with half the RMS voltage of the AC power line).
Unlike the other common forms of AC motors (induction motors and synchronous motors), universal motors can easily exceed one revolution per cycle of the mains current (that is, exceed 3000 rpm on a 50 Hz system or 3600 rpm on a 60 Hz system). This makes them especially useful for certain appliances such as blenders, vacuum cleaners, and hair dryers where high-speed operation is desired.
With the very low cost of semiconductor rectifiers, some applications that would have previously used a universal motor now use a pure DC motor, usually with a permanent magnet field. This is especially true if the semiconductor circuit is also used for variable-speed control.
AC motors
Induction motors operate because a moving magnetic field induces a current to flow in the rotor. This current in the rotor creates the second magnetic field required (along with the field from the stator windings) to produce a torque. Induction motors are simple and therefore relatively cheap to construct. They do not rely on brushes like the DC motor, and usually have a longer life. They are by far the most common type of motor for applications above 1 kW. Typically the rotor has no electrical connection to the outside world, except in the case of wound-rotor induction motors.
All induction motors are characterized by the fact that when no load is applied to the motor, the rotor rotates at a slightly slower rate than the mains frequency (or an integer submultiple of the mains frequency). This is because the rotor must "slip" backwards against the moving magnetic field in order to induce any current in the rotor. The slip increases (and the motor speed decreases) as the load on the motor increases.
The rotating magnetic field principle was conceived by Nikola Tesla in 1882 and he employed it to invent a two-phase induction motor in 1883. Michael von Dolivo-Dobrowlsky invented the first modern three-phase "cage-rotor" in 1890. Introduction of the motor from 1888 onwards initiated what is known as the second industrial revolution, making possible the efficient generation and long distance distribution of electrical energy using the alternating current transmission system, also of Tesla's invention (1888)[1] (http://www.tfcbooks.com/tesla/system.htm). A notable recent invention by Anadish K. Pal (U.S Patent 6717300) is to use an induction motor to sense its own rotation in the absence of the driving electric power. This invention has applications in alarm systems and early failure prediction of the induction motors.
AC motors generally come in two types: single phase and three phase.
Single-phase AC induction motors
A polyphase induction motor will continue to rotate even if one phase is disconnected, at reduced torque. However, a polyphase motor at standstill will not generate any net starting torque if connected only to a single-phase supply. The key to the design of single-phase motors, then, is to provide a rotating magnetic field to produce starting torque.
A common single-phase motor is the shaded pole motor, which is used in devices requiring lower torque, such as electric fans, microwave ovens, and other small household appliances. In this motor, small single-turn copper "shading coils" create the moving magnetic field. Part of each pole is encircled by a copper coil or strap; the induced current in the strap opposes the change of flux through the coil (Lenz's Law), so that the maximum field intensity moves across the pole face on each cycle.
Another common single-phase AC motor is the split-phase induction motor, commonly used in major appliances such as washing machines and clothes dryers. Compared to the shaded pole motor, these motors can generally provide much greater starting torque by using a special startup winding in conjunction with a centrifugal switch.
In the split phase motor, the startup winding is designed with a higher resistance than the running winding. This creates an LR circuit which slightly shifts the phase of the current in the startup winding. When the motor is starting, the startup winding is connected to the power source via a set of spring-loaded contacts pressed upon by the not-yet-rotating centrifugal switch. The starting winding is wound with fewer turns of smaller wire than the main winding, so it has a higher resistance. The extra resistance creates a small phase shift, not more than about 30 degrees, between the flux due to the main winding and the flux of the starting winding.
The phase of the magnetic field in this startup winding is shifted from the phase of the mains power, allowing the creation of a moving magnetic field which starts the motor. Once the motor reaches near design operating speed, the centrifugal switch activates, opening the contacts and disconnecting the startup winding from the power source. The motor then operates solely on the running winding. The starting winding must be disconnected since it would increase the losses in the motor.
In a capacitor start motor, a starting capacitor is inserted in series with the startup winding, creating an LC circuit which is capable of a much greater phase shift (and so, a much greater starting torque). The capacitor naturally adds expense to such motors.
Another variation is the Permanent Split-Capacitor (PSC) motor. This motor operates similarly to the capacitor-start motor described above, but there is no centrifugal starting switch and the second winding is permanently connected to the power source. PSC motors are frequently used in air handlers, fans, and blowers and other cases where a variable speed is desired. By changing taps on the running winding but keeping the load constant, the motor can be made to run at different speeds.
The rotors of most single-phase induction motors are of the squirrel cage design. These rotors take their name from "windings" that are in the style of the wheel on which pet rodents exercise: a series of bars that connect conductive rings at both ends of the rotor. In fact, these "windings" are not wound into the rotor but instead are cast aluminum that fills the slots in the stackup of steel laminations. Because each winding is a single turn, the induced voltages in the rotor windings are very low and there is no need to insulate the cast-in-place "windings" from the steel laminations. (The currents in the rotor are, of course, proportionally as high as the voltage is low, but the cast aluminum windings have very little electrical resistance so I2R losses in the rotor are small.)
Single-phase AC synchronous motors
Small single-phase AC motors can also be designed with magnetized rotors (or several variations on that idea). The rotors in these motors do not require any induced current so they do not slip backward against the mains frequency. Instead, they rotate synchronously with the mains frequency. Because of their highly accurate speed, such motors are usually used to power mechanical clocks, audio turntables, and tape drives; formerly they were also much used in accurate timing instruments such as strip-chart recorders or telescope drive mechanisms. The shaded-pole synchronous motor is one version.
Because inertia makes it difficult to instantly accelerate the rotor from stopped to synchronous speed, these motors normally require some sort of special feature to get started. Various designs use a small induction motor (which may share the same field coils and rotor as the synchronous motor) or a very light rotor with a one-way mechanism (to ensure that the rotor starts in the "forward" direction).
Three-phase AC induction motors
For higher-power applications where a polyphase electrical supply is available, the three phase (or polyphase) AC induction motor is used. The phase differences between the three phases of the polyphase electrical supply create a rotating electromagnetic field in the motor.
There are two types of rotors in use. Most motors use the squirrel cage rotor discussed above. An alternate design, called the wound rotor, is used when variable speed is required. In this case, the rotor has the same number of poles as the stator and the windings are made of wire, connected to slip rings on the shaft. Carbon brushes connect the slip rings to an external controller such as a variable resistor that allows changing the motor's slip rate. In certain high-power variable speed wound-rotor drives, the slip-frequency energy is captured, rectified and returned to the power supply through an inverter.
Compared to squirrel cage rotors, wound rotor motors are expensive and require maintenance of the slip rings and brushes, but they were the standard form for variable speed control before the advent of compact power electronic devices. Transistorized inverters with variable frequency drive can now be used for speed control and wound rotor motors are becoming less common. (Transistorized inverter drives also allow the more-effecient three-phase motors to be used when only single-phase mains current is available.)
Several methods of starting a polyphase motor are used. Where the large inrush current and high starting torque can be permitted, the motor can be started across the line, by applying full line voltage to the terminals. Where it is necessary to limit the starting inrush current (where the motor is large compared with the short-circuit capacity of the supply), reduced voltage starting using either series inductors, an autotransformer, thyristors, or other devices are used. A technique sometimes used is wye-delta starting, where the motor coils are initially connected in wye for acceleration of the load, then switched to delta when the load is up to speed. Transistorized drives can directly vary the applied voltage as required by the starting characteristics of the motor and load.
As in the single-phase motor, through electromagnetic induction, the rotating magnetic field induces a current in the conductors in the rotor, which in turn sets up a counterbalancing magnetic field that causes the rotor to turn in the direction the field is rotating. And just as with the single-phase motor, the rotor must always rotate slower than the rotating magnetic field produced by the polyphase electrical supply; otherwise, no counterbalancing field will be produced in the rotor.
This type of motor is becoming more common in traction applications such as locomotives, where it is known as the asynchronous traction motor.
The speed of the AC motor is determined primarily by the frequency of the AC supply and the number of poles in the stator winding, according to the relation:
RPM = 2 * F * 60/p
where
- RPM = (Synchronous) Revolutions
per minute
- F = AC power frequency
- p = Number of poles, usually an even number but always a multiple of the number of phases
- F = AC power frequency
The torque is a function of the amount of slip, or difference in rotation, between the rotor and stator fields. Standard motors have between 2-3% slip, special motors may have up to 7% slip, and a class of motors known as torque motors are rated to operate at 100% slip (0 RPM/full stall).
The torque is determined by the amount of slip, or difference in rotation, between the rotor and stator fields.
The speed in this type of motor has traditionally been altered by having additional sets of coils or poles in the motor that can be switched on and off to change the speed of magnetic field rotation. However, developments in power electronics mean that the frequency of the power supply can also now be varied to provide a smoother control of the motor speed.
Three-phase AC synchronous motors
As with single-phase motors, if the rotor coils of a three-phase motor are fed a separate field current to create a continuous magnetic field (or if the rotor consists of a permanent magnet), the result is a called a synchronous motor because the rotor will rotate in synchronism with the rotating magnetic field produced by the polyphase electrical supply.
A synchronous motor can also be used as an alternator.
Nowadays, synchronous motors are frequently driven by transistorized variable-frequency drives. This greatly eases the problem of starting the massive rotor of a large synchronous motor. They may also be started as induction motors using a squirrel-cage winding that shares the common rotor: once the motor reaches synchronous speed, no current is induced in the squirrel-cage winding so it has little effect on the synchronous operation of the motor.
Synchronous motors are occasionally used as traction motors; the TGV may be the best-known example of such use.
Induction motors are the workhorses of industry and motors up to about 500 kW in output are produced in highly standardized frame sizes, making them nearly completely interchangeable between manufacturers (although European and North American standard dimensions are of course different).
Stepper motors
Closely related in design to three-phase AC synchronous motors are stepper motors, where an internal rotor containing permanent magnets or a large iron core with salient poles is controlled by a set of external magnets that are switched electronically. A stepper motor may also be thought of as a cross between a DC electric motor and a solenoid. As each coil is energized in turn, the rotor aligns itself with the magnetic field produced by the energized field winding. Unlike a synchronous motor, in its application, the motor may not rotate continuously; instead, it "steps" from one position to the next as field windings are energized and deenergized in sequence. Depending on the sequence, the rotor may turn forwards or backwards.
Simple stepper motor drivers entirely energize or entirely deenergize the field windings, leading the rotor to "cog" to a limited number of positions; more sophisticated drivers can proportionally control the power to the field windings allowing the rotors to position "between" the "cog" points and thereby rotate extremely smoothly. Computer controlled stepper motors are one of the most versatile forms of positioning systems, particularly when part of a digital servo-controlled system.
Brushless DC motors
Midway between ordinary DC motors and stepper motors lies the realm of the brushless DC motor. Built in a fashion very similar to stepper motors, these often use a permanent magnet external rotor, three phases of driving coils, one or more Hall effect devices to sense the position of the rotor, and the associated drive electronics. The coils are activated, one phase after the other, by the drive electronics as cued by the signals from the Hall effect sensors. In effect, they act as three-phase synchronous motors containing their own variable frequency drive electronics.
Brushless DC motors are commonly used to drive fans, the spindles within CD, CD-ROM (etc.) drives, and mechanisms within office products such as laser printers and photocopiers. They also find significant use in high-performance electric model aircraft. They have several advantages over conventional motors:
- Compared to AC fans using shaded-pole motors, they are very efficient, running much cooler than the equivalent AC motors. This cool operation leads to much-improved life of the fan's bearings.
- Without a commutator to wear out, the life of a DC brushless motor can be significantly longer compared to a DC motor using brushes and a commutator
- The same Hall effect devices that provide the commutation can also provide a convenient tachometer signal for closed-loop control (servo-controlled) applications. In fans, the tachometer signal can be used to derive a "fan okay" signal.
- The motor can be easily synchronized to an internal or external clock, leading to precise speed control.
Modern DC brushless motors range in power from a fraction of a watt to many kilowatts.
Coreless DC motors
A coreless DC motor is a specialized form of an ordinary DC motor. Optimized for rapid acceleration, these motors have a rotor that is constructed without any iron core. The rotor can take the form of a winding-filled cylinder inside the stator magnets, a basket surrounding the stator magnets, or a flat pancake (possibly formed on a printed wiring board) running between upper and lower stator magnets. The windings are typically stabilized by being impregnated with epoxy resins.
Because the rotor is much lighter in weight (mass) than a conventional rotor formed from copper windings on steel laminations, the rotor can accelerate much more rapidly, often achieving a mechanical time constant under 1 ms. This is especially true if the windings use aluminum rather than the heavier copper. But because there is no metal mass in the rotor to act as a heat sink, even small coreless motors must often be cooled by forced air.
These motors were commonly used to drive the capstan(s) of magnetic tape drives and are still widely used in high-performance servo-controlled systems.
Linear motors
A linear motor is essentially an electric motor that has been "unrolled" so that instead of producing a torque (rotation), it produces a linear force along its length by setting up a traveling electromagnetic field.
Linear motors are most commonly induction motors or stepper motors. You can find a linear motor in a maglev (Transrapid) train, where the train "flies" over the ground.
See also
Centrifugal switch | Commutator (electric) | Electrical element | Electrical generator | Electric vehicle | Frank J. Sprague | George Westinghouse | List of electronics topics | List of technologies | Maximum power theorem | Motor | Motor controller | Propulsion method | Single phase electric power | slip ring | Table saw | Thomas Edison | Timeline of motor and engine technology | Westminster motor kits
A self-teaching textbook that briefly covers electric motors, transformers, speed controllers, wiring codes and grounding, transistors, digital, etc., is:
Shanefield D. J., Industrial Electronics for Engineers, Chemists, and Technicians, William Andrew Publishing, Norwich, NY, 2001.
Although this book is unusually easy to read and understand (see customer reviews at bookseller sites), it only goes up to an elementary level on each subject, and it is not a suitable reference book for technologists already working in any of those fields.
References
Donald G. Fink and H. Wayne Beaty, Standard Handbook for Electrical Engineers, Eleventh Edition, McGraw-Hill, New York, 1978, ISBN 007020974X