Radar
RADAR is an acronym for RAdio Detection And Ranging or Radio Angle Detection And Ranging. It is a system used to detect, range (determine the distance of), and map objects such as aircraft and rain. Strong radio waves are transmitted, and a receiver listens for any echoes. By analysing the reflected signal, the reflector can be located, and sometimes identified. Although the amount of signal returned is tiny, radio signals can easily be detected and amplified.
Radar radio waves can be easily generated at any desired strength, detected at even tiny powers, and then amplified many times. Thus radar is suited to detecting objects at very large ranges where other reflections, like sound or visible light, would be too weak to detect.
Principles
Reflection
Electromagnetic waves reflect from any large change in the dielectric or diamagnetic constants. This means that a solid object in air or vacuum, or other significant changes in atomic density between object and what's surrounding it, will usually reflect radar waves. This is particularly true of electrically-conductive materials such as metal, making radar particularly well suited to the detection of aircraft and ships.
Radar waves reflect in a variety of ways depending on the size of the radio wave and the shape of the target. If the radio wave is much shorter than the reflector's size, the wave will bounce off in a way similar to the way light bounces from a mirror. Early radars used very long wavelengths that were larger than the targets and received a vague signal, whereas modern systems use shorter wavelengths (a few centimetres) that can image objects as small as a loaf of bread.
Radio waves always reflect from curves and corners, in a way similar to glint from a rounded piece of glass. The most reflective targets have 90° angles between the reflective surfaces. A surface consisting of three flat surfaces meeting at a single corner, like the corner on a block, will always reflect directly back at the source. These so-called corner cubes are commonly used as radar reflectors to make otherwise difficult-to-detect objects easier to detect, and are often found on boats in order to improve their detection in a rescue situation. For generally the same reasons objects attempting to avoid detection will angle their surfaces in a way to eliminate corners, which leads to "odd" looking stealth aircraft.
Electromagnetic waves do not travel well underwater; thus for underwater applications, sonar, based on sound waves, has to be used instead of radar.
Polarization
Polarization is the direction that the wave vibrates. Radars use horizontal, vertical, and circular polarization to detect different types of reflections. For example, circular polarization is used to minimize the interference caused by rain. Linear polarization returns usually indicate metal surfaces, and help a search radar ignore rain. Random polarization returns usually indicate a fractal surface like rock or dirt, and are used by navigational radars.
Distance measurement
Transit time
The easiest
way to measure the range of an object is to broadcast a short pulse of radio
signal, and then time how long it takes for the reflection to return. The distance
is one-half the product of round trip time (because the signal has to travel to
the target and then back to the receiver) and the speed of the signal.  where c is the speed of light in a
vacuum, and Ï„ is the round trip time. For RADAR the
speed of signal is the speed
of light, making the round trip times very short for terrestrial ranging.
For this reason accurate distance measurement was difficult until the introduction
of high performance electronics, with older systems being accurate to perhaps
a few percent.
where c is the speed of light in a
vacuum, and Ï„ is the round trip time. For RADAR the
speed of signal is the speed
of light, making the round trip times very short for terrestrial ranging.
For this reason accurate distance measurement was difficult until the introduction
of high performance electronics, with older systems being accurate to perhaps
a few percent.
The receiver cannot detect the return while the signal is being sent out – there's no way to tell if the signal it hears is the original or the return. This means that a radar has a distinct minimum range, which is the length of the pulse divided by the speed of light, divided by two. In order to detect closer targets you have to use a shorter pulse length.
A similar effect imposes a specific maximum range as well. If the return from the target comes in when the next pulse is being sent out, once again the receiver cannot tell the difference. In order to maximize range, one wants to use longer times between pulses, the inter-pulse time.
These two effects tend to be at odds with each other, and it is not easy to combine both good short range and good long range in a single radar. This is because the short pulses needed for a good minimum range broadcast have less total energy, making the returns much smaller and the target harder to detect. You could offset this by using more pulses, but this would shorten the maximum range again. So each radar uses a particular type of signal. Long range radars tend to use long pulses with long delays between them, and short range radars use smaller pulses with less time between them. This pattern of pulses and pauses is known as the Pulse Repetition Frequency (or PRF), and is one of the main ways to characterize a radar. As electronics have improved many radars now can change their PRF.
Frequency modulation
Another form of distance measuring radar is based on frequency modulation. Frequency comparison between two signals is considerably more accurate, even with older electronics, than timing the signal. By changing the frequency of the returned signal and comparing that with the original, the difference can be easily measured.
This technique can be used in radar systems, and is often found in aircraft radar altimeters. In these systems a "carrier" radar signal is frequency modulated in a predictable way, typically varying up and down with a sine wave or sawtooth pattern at audio frequencies. The signal is then sent out from one antenna and received on another, typically located on the bottom of the aircraft, and the signal can be continuously compared.
Since the signal frequency is changing, by the time the signal returns to the aircraft the broadcast has shifted to some other frequency. The amount of that shift is greater over longer times, so greater frequency differences mean a longer distance, the exact amount being the "ramp speed" selected by the electronics. The amount of shift is therefore directly related to the distance travelled, and can be displayed on an instrument. This signal processing is similar to that used in speed detecting doppler radar. See also the section on Continuous Wave radar below.
Speed measurement
Speed is the change in distance to an object with respect to time. Thus the existing system for measuring distance, combined with a little memory to see where the target last was, is enough to measure speed. At one time the memory consisted of a user making grease-pencil marks on the radar screen, and then calculating the speed using a slide rule.
However there is another effect that can be used to make much more accurate speed measurements, and do so almost instantly (no memory required), known as the Doppler effect. Practically every modern radar uses this principle in the pulse-doppler radar system. It is also possible to make a radar without any pulsing, known as a continuous-wave radar (CW radar), by sending out a very pure signal of a known frequency. Return signals from targets are shifted away from this base frequency via the Doppler effect enabling the calculation of the speed of the object relative to the radar.
Position measurement
Radio signals broadcast from a single antenna will spread out in all directions, and likewise a single antenna will receive signals equally from all directions. This leaves the radar with the problem of deciding where the target object is located.
Early systems
- main article History of radar
Early systems tended to use omni-directional broadcast antennas, with directional receiver antennas which were pointed in various directions. For instance the first system to be deployed, Chain Home, used two straight antennas at right angles for reception, each on a different display. The maximum return would be detected with an antenna at right angles to the target, and a minimum with the antenna pointed directly at it (end on). The operator could determine the direction to a target by rotating the antenna so one display showed a maximum while the other shows a minimum.
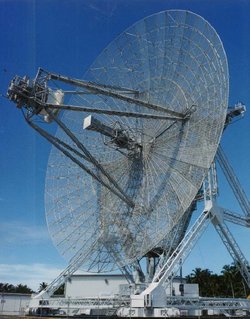
One serious limitation with this type of solution is that the broadcast is sent out in all directions, so the amount of energy in the direction being examined is subject to the inverse-square law. To get a reasonable amount of power on the "target", the broadcast should also be steered. More modern systems used a steerable parabolic "dish" to create a tight broadcast beam, typically using the same dish as the receiver. Such systems often combined two radar frequencies in the same antenna in order to allow automatic steering, or radar lock.

Phased array
Another method of steering is used in phased array radar, which uses the radio signal's interference with itself. If one were to broadcast a single signal from a large number of antennas, the result will be a single beam with the waves in the rest of space cancelling each other. If the phase of the signal is changed before broadcast, the direction of the beam can be moved because the point of constructive interference will move. Instead of constructing a single large antenna, such a system has a number of small omni-directional antennas referred to as elements, usually arranged in a flat plate.
Phased array radars require no physical movement. The beam can be steered by electronically adjusting the phase-shifters to each small antenna element. This means that the beam can scan at thousands of degrees per second, fast enough to irradiate many individual targets, and still run a wide-ranging search periodically. By simply turning some of the antennas on or off, the beam can be spread for searching, narrowed for tracking, or even split into two or more virtual radars.
Phased array radars have been in use since the earliest years of radar use in World War II, but limitations of the electronics led to fairly poor accuracy. Phased array radars were originally used for missile defence. They are the heart of the ship-bourne Aegis combat system, and the Patriot Missile System, and are increasingly used in other areas because the lack of moving parts makes them more reliable, and sometimes permits a much larger effective antenna.
As the price of electronics has fallen, phased array radars have become more and more common. Almost all modern military radar systems are based on phased arrays, where the small additional cost is far offset by the improved reliability of a system with no moving parts. Traditional moving-antenna designs are now limited to roles where cost is the main factor such as weather radars and similar systems.
Phased array radars are also valued for use in aircraft, since they can track multiple targets. The first aircraft to use phased array radar was the Mikoyan MiG-31.
Radar equation
The amount of power Pr returning to the receiving antenna is given by the radar equation:
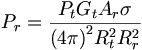
where
- Pt = transmitter power,
- Gt = gain of transmitting antenna,
- Ar = effective aperture (area) of receiving antenna,
- σ = Radar Cross Section, or scattering coefficient of target,
- Rt = distance from transmitter to target,
- Rr = distance from target to receiver.
In the common case where the transmitter and receiver are at the same location, Rt = Rr and the term Rt² Rr² can be replaced by R4, where R is the range. This yields:
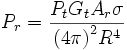
This shows that the received power declines as the fourth power of the range, which means that the reflected power from distant targets is very, very small.
Other mathematical developments in radar signal processing include time-frequency analysis (Weyl Heisenberg or wavelet), as well as the chirplet transform which makes use of the fact that radar returns from moving targets typically "chirp" (change their frequency as a function of time, as does the sound of a bird or bat).
Frequency bands
The traditional band names originated as code-names during World War II and are still in military and aviation use throughout the world in the 21st century. They have been adopted in the United States by the IEEE, and internationally by the ITU. Most countries have additional regulations to control which parts of each band are available for civilian or military use.
Other users of the radio spectrum, such as the broadcasting and electronic countermeasures (ECM) industries, have replaced the traditional military designations with their own systems.
| Band Name | Frequency Range | Wavelength Range | Notes |
|---|---|---|---|
| HF | 3-30 MHz | 10-100 m | coastal radar systems;'high frequency' |
| P | < 300 MHz | 1 m+ | 'P' for 'previous', applied retrospectively to early radar systems |
| VHF | 50-330 MHz | 0.9-6 m | very long range, ground penetrating; 'very high frequency' |
| UHF | 300-1000 MHz | 0.3-1 m | very long range (e.g. ballistic early warning), ground penetrating; 'ultra high frequency' |
| L | 1-2 GHz | 15-30 cm | long range air traffic control and surveillance; 'L' for 'long' |
| S | 2-4 GHz | 7.5-15 cm | terminal air traffic control, long range weather, marine radar; 'S' for 'short' |
| C | 4-8 GHz | 3.75-7.5 cm | a compromise (hence 'C') between X and S bands; weather |
| X | 8-12 GHz | 2.5-3.75 cm | missile guidance, marine radar, weather; in the USA the narrow range 10.525GHz ±25MHz is used for airport radar. |
| Ku | 12-18 GHz | 1.67-2.5 cm | high-resolution mapping, satellite altimetry; frequency just under K band (hence 'u') |
| K | 18-27 GHz | 1.11-1.67 cm | from German kurz, meaning 'short'; limited use due to absorption by water vapour, so Ku and Ka were used instead for surveillance. K-band is used for detecting clouds by meteorologists, and by police for detecting speeding motorists. K-band radar guns operate at 24.150 ± 0.100 GHz. |
| Ka | 27-40 GHz | 0.75-1.11 cm | mapping, short range, airport surveillance; frequency just above K band (hence 'a') Photo radar, used to take pictures of license plates of cars running red lights, operates at 34.300 ± 0.100 GHz. |
| mm | 40-300 GHz | 1 - 7.5mm | 'millimetre' band, subdivided as below |
| V | 40-75 GHz | 4.0 - 7.5 mm | |
| W | 75-110 GHz | 2.7 - 4.0 mm | used as a visual sensor for experimental autonomous vehicles, high-resolution meterological observation |
Specific radar systems
- Active Electronically Scanned Array (AESA)
- Continuous-wave radar
- Doppler radar as weather radar
- Millimetre cloud radar
- NEXRAD
- Passive radar
- Pulse-doppler radar
- Radar gun traffic and sports radars
- Secondary surveillance radar (SSR)
- Synthetic aperture radar
- X-band radar
See also
- Types and uses of radar
- History of radar
- Magnetron
- List of radars
- Radio
- Similar detection and ranging methods
Further reading
- Barrett, Dick, "All you ever wanted to know about British air defence radar". The Radar Pages. (History and details of various British radar systems)
- ES310 "Introduction to Naval Weapons Engineering.". (Radar fundamentals section)
- Robert Buderi: The invention that changed the world: the story of radar from war to peace, Simon & Schuster, 1996. ISBN 0-349-11068-9
- Merrill I. Skolnik, Radar Handbook. ISBN 007057913X widely used in the US since the 1970s.
- R.V. Jones, Most Secret War. R.V. Jones's account of his part in British Scientific Intelligence between 1939 and 1945, working to anticipate the German's radar, radio navigation and V1/V2 developments.
External links
The first operational radar in France 1934
- Hollmann, Martin, "Radar Family Tree". Radar World.
- Penley, Bill, and Jonathan Penley, "Early Radar History - an Introduction". 2002.
- Buderi, "Telephone History: Radar History". Privateline.com. (Anecdotal account of the carriage of the world's first high power cavity magnetron from Britain to the US during WW2.)
- Sinnott, D.H., "The Development of Over-the-Horizon Radar in Australia"
- USAF Long Range Radar, "84th Radar Evaluation Squadron". US Air Force Squadron responsible for long-range Radar Sensor (both civilian and military) operational availability, counterdrug, search and rescue, and flight safety information assurance to the operations community..